After restoring the RPM trimmer panel of the Beogram 4002 (5501) that I am rebuilding right now, it was time to look into the not working end groove detection mechanism. This mechanism is an exciting part of this design. It uses a light bulb and a photoresistor in conjunction with an encoder wheel doubling as pulley to detect the moment when the carriage starts moving faster after the last track of a record is over. This allows cutting short the time it takes until the arm returns to the home position on records that have a wide end groove section (such as many 12" singles or some short playtime LPs).
This shows the setup:

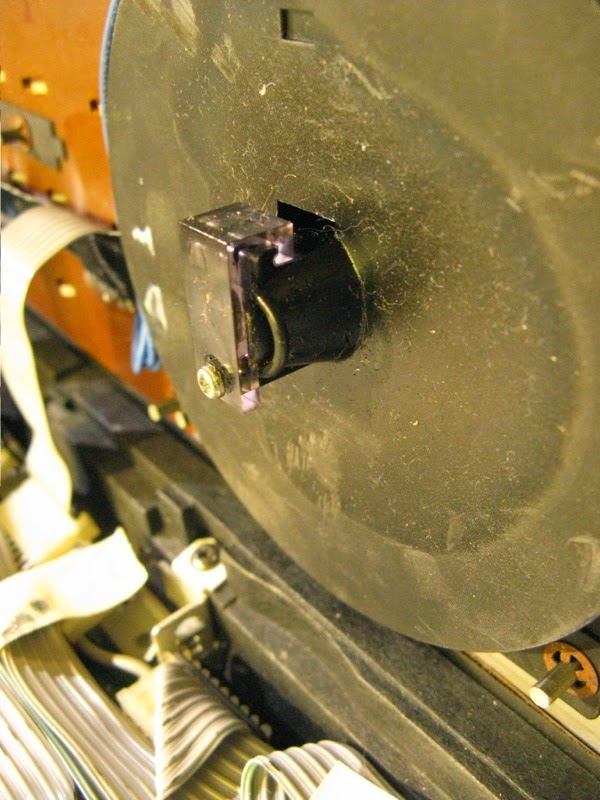
The bulb illuminates small holes that are in the pulley that is driven by the carriage motor. The light sensor is located on the other side of the spindle bearing. Unfortunately, the light bulb fixture of this Beogram had a broken off tab requiring some tape to hold it in place. Here is a picture of the bulb assembly pulled from the bearing unit:

The tab goes into the groove on top of the pulley bearing assembly. The back part of the tab is missing. You can also see very nicely the crack in the pulley. Nick is already working on a redesign of his standard aluminum pulley for the 4002 to add the small holes necessary for the end groove detection mechanism to work. Thanks Nick!
Naturally, this was not a Beolover acceptable state of affairs and so I designed a replacement part upgrading the system with an LED.
Here are a few impressions. This is the finalized component holding an amber high intensity LED (Newark 78R6602) and a 2k resistor (Newark 26R3983) reducing the current to below spec level of the LED. The resistor sits in a small holder on the left side to keep things neat and tidy:

This shows it illuminated at 23V:

And installed:

It press-fits right on top of the pulley bearing assembly

This shows it in action after the end groove circuit is activated via a carriage position switch:

I tested it and it seems to work great.
Here is an explanation how the end groove detection system works:
This shows the relevant section of the circuit diagram:

0IL1 is the LED. The switch 8009021 is the second carriage position switch on the B-rail:

Once 0IL1 comes on, the holes on the pulley begin to illuminate OR2. This causes voltage fluctuations across 1C35 which briefly turn off TR21. This applies a brief voltage pulse to C33 via D31 and R90. Hence, every time a hole of the pulley comes in between 0IL1 and OR2 a small amount of charge is put into C33. Therefore, over time the voltage on C33 increases proportionally to that charge. Once the voltage is high enough, TR20 turns on. TR20 is connected in parallel to the end switch ("ES", A), i.e. to the control system a TR20 in "ON" condition looks like ES was triggered and the arm lifts and the carriage returns home.
You may wonder, "what happens when the lamp turns on, but the needle is still on the last track of the record, and a pulley hole comes by and C33 charges up?" This is why D30 and R91 were added to the circuit as a (competing) path to discharge C33. R91 essentially determines the time it takes to discharge C33, and it was adjusted to discharge it fast enough to compensate for the charge build-up when the pulley only moves slowly when a track is played. In the end groove, however, the carriage moves much faster, and so the pulley holes come by more often, which overwhelms R91, and so the voltage can build up on C33, finally triggering the ES process.
If TR20 is not triggered due to a malfunction of the end groove detection system (dead bulb, for example), the arm will go all the way to the end of the end grove and then ES will be triggered by the carriage and save the day. All the end groove detection system does is to spare the user the wait until the arm goes all the way to the end (and to listen to the static from the groove). A typical B&O approach. Why not make it more perfect if you can?? This is Beolove!


























.jpg)
