This post is a follow up to the initial 'first assessment' post that discussed the overall condition of this Beogram 4002 (5523). This post describes the work that was done to return this Beogram to like-new performance. This shows the unit as received with the aluminum plates off:

As usual the first step was extracting the DC platter motor for re-infusion of its usually dry Oilite bearings. This shows the motor removed from the enclosure:

I disassembled it to get the bearings ready for infusion:

The bearings are the two small donuts upfront on the black bad. I immersed them in motor oil and pulled a vacuum:

Immediately strong bubbling started, indicative of air being withdrawn from the pores of the Oilite material. This escaping air makes room for oil to interdiffuse into the bearing. This process usually takes 2-3 days, and so it is a good idea to start it first thing when restoring a Beogram with DC motor.
The next step was cleaning and re-lubricating of the carriage and arm-lowering mechanisms. This shows the arm lowering mechanism consisting of solenoid and damper:

I removed all these parts

and cleaned them ultrasonically:

While working on the carriage it was a good moment to also update the tracking sensor light bulb with an LED assembly. This shows the original bulb housing:
Here you can see old and new next to each other. The LED in the replacement part is in the same location like the filament of the light bulb:
This shows the LED fixture implanted. The blue potentiometer allows fine-tuning the tracking feedback by adapting the LED brightness:
Another aspect of the restoration of the carriage section is the replacement of the usually cracked plastic pulley. Most crack due to material fatigue caused by the strain exerted by the set screw:
I usually replace them with machined aluminum pulleys:

Beolovely! On to the damper-to-arm linkage, which is often stuck due to hardened lubricants. Re-lubrication requires removal of the sensor arm assembly:

This shows the linkage removed:

While working on this assembly, it is a good idea to also remove the small copper pad that reduces lateral friction when the arm is up, and epoxy it back onto the base of the sensor arm. Its double sided tape is usually degraded:

Once the pivot point of the linkage has been lubricated and the sensor arm has been reinstalled, it is the perfect moment to adjust the horizontal parallelism of the arm:

This concluded the work on the carriage. Next up were the circuit boards. I now start out by replacing the two power transistors on the solder side of the board while the board is still installed. This shows one of them the TIP120 Darlington that acts as voltage regulator for the 24V rail:

When replacing it with a new TIP120, it is necessary to solder a 100nF capacitor between emitter and ground to prevent noise on the 24V rail. I saw this noise issue by now during several TIP120 replacements, and I think this may have to do with the fact that the modern devices may be faster than the originals. The 100nF cap stabilizes the output and the 24V rail is solid again:

After replacing the transistors on top, I removed the board.
A detail shot of the 'RPM section' consisting of the RPM relay and the 33 and 45 adjustment trimmers:

This shows the rebuilt board:

and the updated RPM section:
The output board was next:

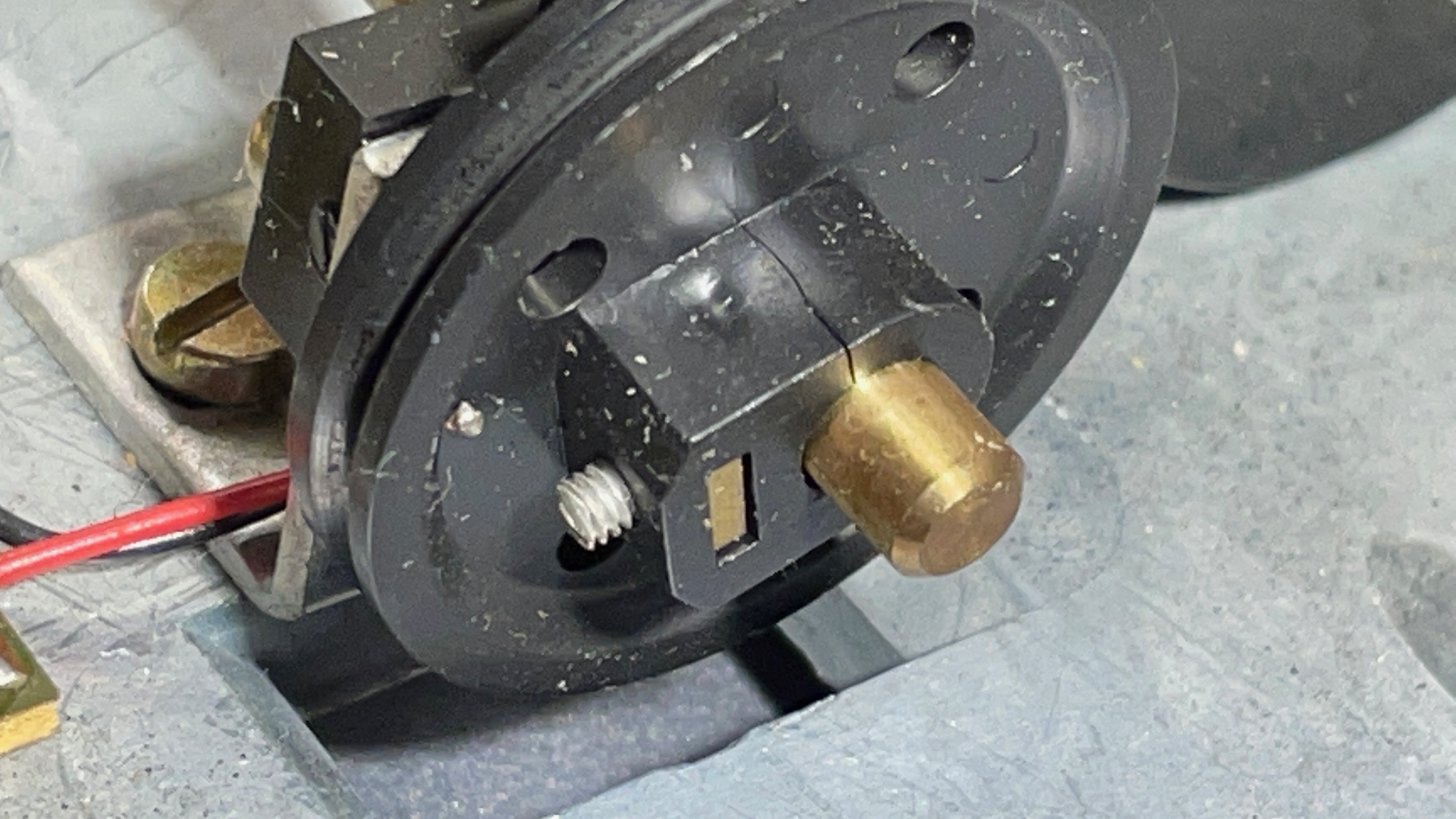
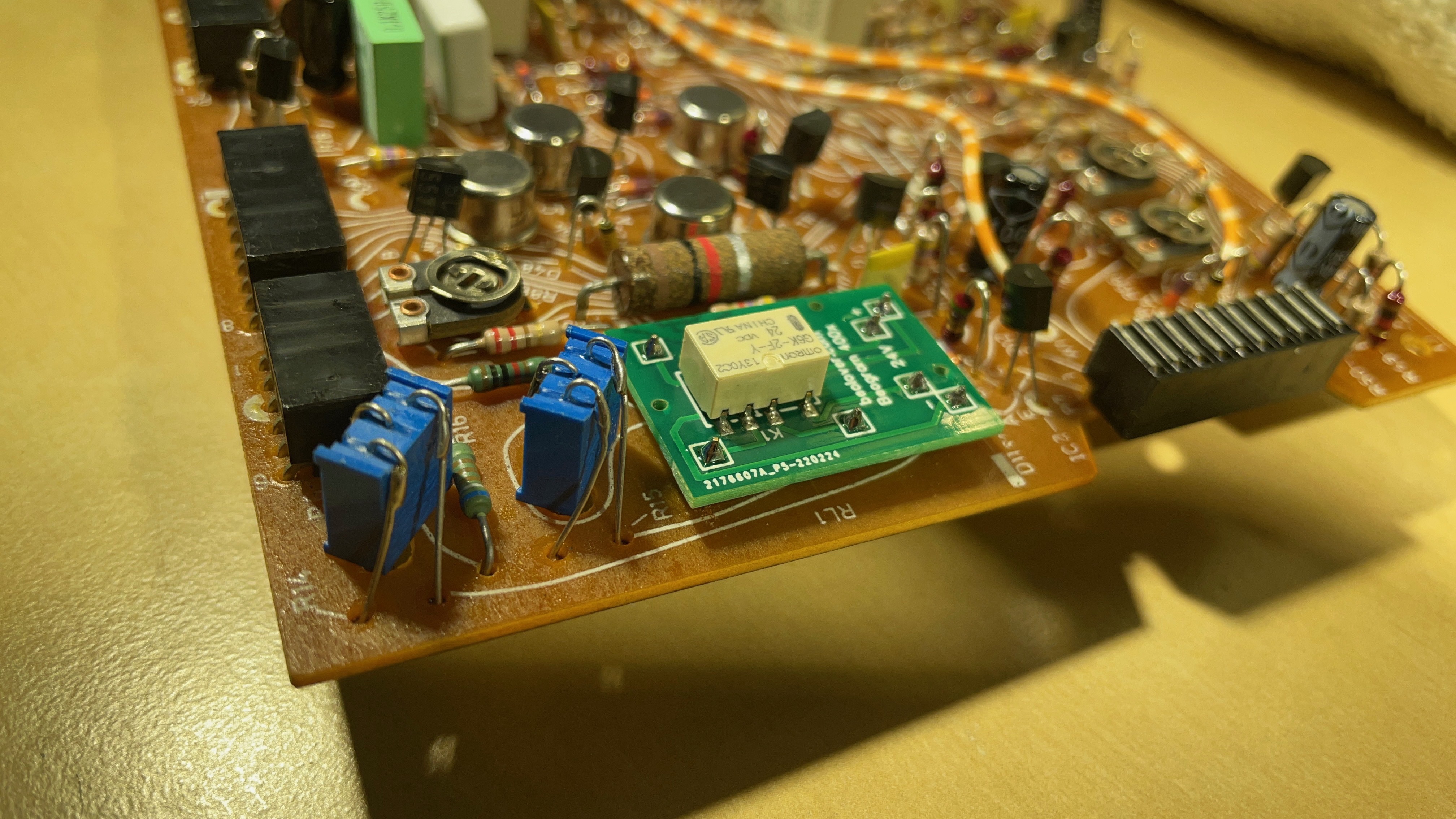
This board was interesting as it is really a 4004 output board, where the remote control section of the 4004 was not populated for use in the 4002. This 4002 must be one of the last ones made before B&O switched to the 4004. I usually replace the electrolytic capacitor that defines the time constant of the output relay and the relay itself, and I install a switch that allows connecting signal and system grounds for hum prevention. This is often helpful when connecting with RCA:

Then I replaced the light bulbs in the RPM panel, which are another (if minor) source of RPM inconsistency. Due to the heat emitted from the bulbs the trimmers in that panel can change their resistance and that changes the RPM. The cooler running LEDs seem to cure such issues. This shows the recently redesigned RPM panel LED boards:

They can be directly soldered to the spots where the bulbs are connected:

This RPM panel had been opened previously, and whoever did it used the original circlips when putting it back together. This is not a good idea since these are not meant to be re-used. This caused a loose attachment in this case. So I removed the clips to replace them with new ones for a more sturdy attachment of the aluminum panel. This gave me an opportunity for taking a picture of the business end of the LED boards as installed:

I put the panel back togehter with new clips and teflon washers:

While everything was removed from the enclosure it was the perfect moment to also take out the floating chassis and replace the disintegrating transport lock bushings
with new 3D printed nylon replacements:
These plug right into the holes from below and from the top:
This shows the lock reassembled:
At this point I also replaced the original reservoir capacitor with a new one:

The remaining bulb to replace was the bulb in the sensor arm. It turned out that the bulb in the compartment was not original. The top bulb is an original one, while the bottom one was the replacement:

This shows the recently redesigned LED replacement assembly with its compartment insert that helps defining the LED location in the right spot in front of the lens that is at the bottom of the bulb compartment. It focuses the light onto the platter, to give the sensor enough intensity:

Here you see the LED in action: A nice red/orange logo color and a well defined spot on the platter:

I measured the sensor signal while the platter was spinning. This is what I saw on the oscilloscope:

A perfect trace with an amplitude larger than 6V and nicely defined troughs as ribs passed under the sensor. At this point the functional restoration was nearing its end. What was left were adjustments of the floating chassis, platter height, arm height, arm weight calibration and tracking feedback. I first adjusted the the platter and chassis, and then it was time to do the arm. This shows the original setup of the counterweight adjustment screw with its flimsy circlip to hold it in place:

This circlip does not really fix the weight in place very precisely, and so I usually replace it with a washer and a nut, which makes the setup more stable that it can withstand the rigors of shipping without changing the weight calibration:

After this operation it was time to calibrate the weight scale in the arm housing around 1.2g for a standard B&O cartridge:
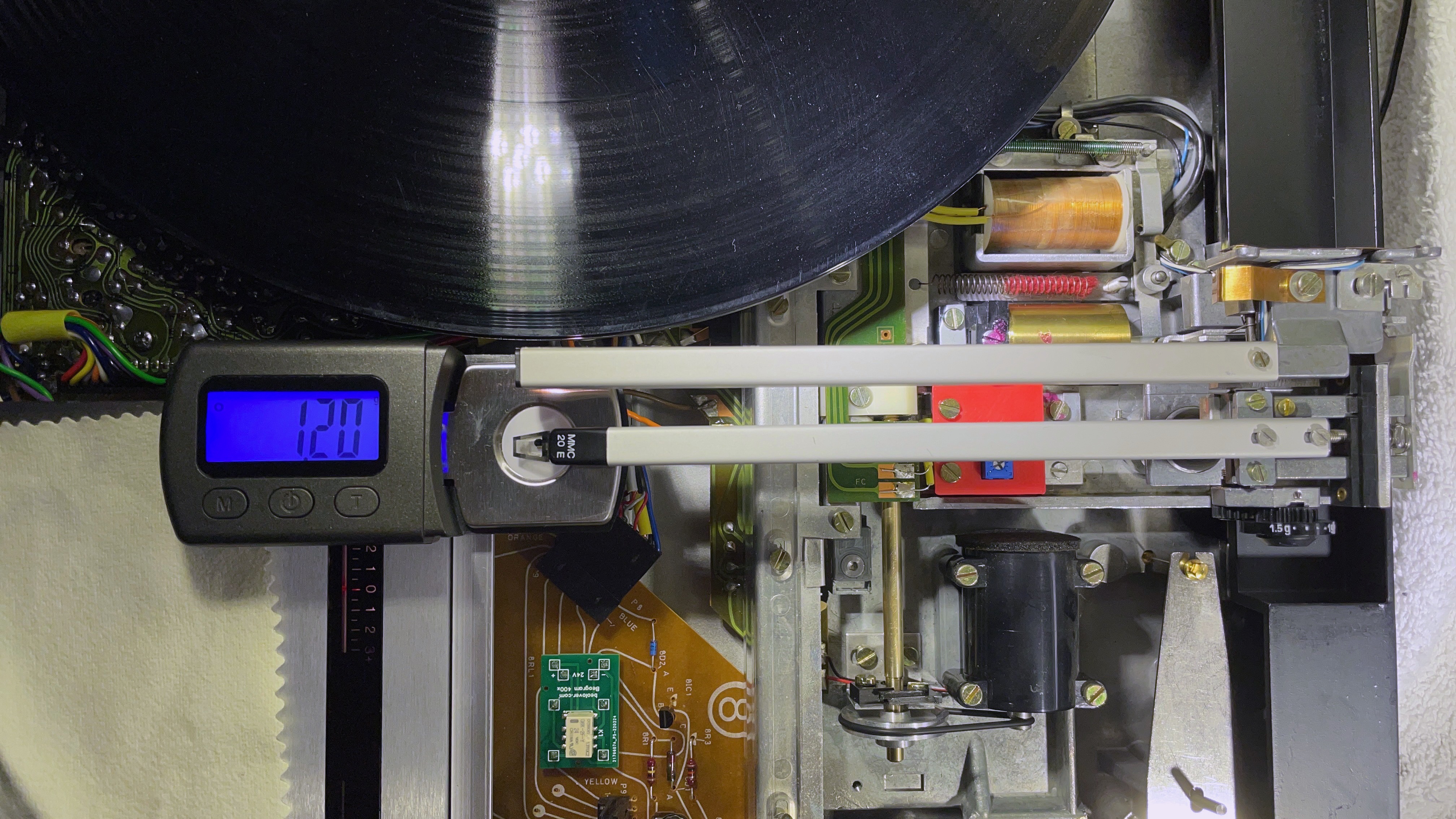
While this adjustment is nice to have done, it is usually best to not rely on the weight scale. Instead use a digital gauge to actually measure the tracking weight and simply adjust the wheel to whatever necessary for getting the proper weight for your cartridge.
After this adjustment I also adjusted the arm lowering limit. This is an important adjustment as it prevents catastrophic damage should the arm ever lower onto the platter due to a malfunction of the record detection circuit:

Finally, I adjusted the tracking feedback:
Then it was time to replace the original RCA plugs with new gold plated all-metal plugs for best shielding. This shows the original B&O plugs:

And here the very golden replacements:

After this I had a look at the motor bearings and found that the bubbling had stopped, indicating that the infusion process was completed. I extracted the bearings from the oil

and re-installed them in the motor. Then I put the motor back onto its place and ran the platter, monitoring the RPM with the BeoloverRPM device:

It allows logging the RPM in 10s intervals over extended periods of time. Perfect for detecting intermittent RPM issues. This is the curve I measured after about 24 hrs:

This is pretty much as good as it gets with the DC motor Beograms! Perfect!
The last step before giving this deck its first spin was the installation of the Beolover Commander remote control module. It allows controlling all functions without ever needing to touch the precious and easily damaged keypad. It also adds auto-repeat and fast scanning capabilities in a similar way as found in later Beogram 800x turntables:

See here for more information about the Commander if you are interested in getting one for your Beogram. It installs 'plug-and-play' without soldering in DC Beogram versions (Type 551x and 552x).
And now it was finally time to play a first record on this restored Beogram 4002! I selected a recently acquired album by Deodato, "First Cuckoo", which he recorded in 1975 (MCA 491). My favorite track is the cool and smooth "Adam's Hotel" on side 1. Perfect for listing while restoring Beograms! Of course this record was cleaned ultrasonically using a CleanerVinyl ProXL System. I love Deodato covers! This one in particular struck my interest. Perfect together with this lovely like-new operating Beogram 4002, which may have been manufactured a couple years after this album came out:

Beolovely! I will now play this deck for a couple weeks more to make sure there are no intermittent issues. This will also give me some time to polish the scratched hood to a decent state that this Beogram will appear in an almost new condition when everything is done!
No comments:
Post a Comment
Comments and suggestions are welcome!