This post describes the restoration of a Beogram 4002 that I recently received from a customer in Texas. My initial assessment of the unit is posted here.
This shows the unit with the aluminum panels removed. It was in original condition, a perfect starting point for a functional restoration:

As usual, I started with the DC platter motor, they all need their Oilite bearings re-infused with oil. This shows the extracted motor:

I disassembled it to get to the bearings. They are the two small donuts on the black pad upfront:

I immersed them in oil and pulled a vacuum. Immediately strong bubbling started:

This bubbling is a sign that the vacuum draws the air from the empty porous bearing material. This makes room for fresh oil to diffuse into the material. Oilite bearings work by releasing minute amounts of oil from their pores onto the shaft while the motor is running. Unfortunately, this means that they have a finite life/runtime.
The infusion process usually takes 2-3 days. In the meantime, I focused on the rest of the Beogram.
The next step was the restoration of the mechanical carriage systems, the arm lowering mechanism and the components that allow moving the carriage itself. This shows all the parts still in place:

I took everything apart. It is a good idea to rest the carriage on a soft support pad while the rods and spindle are removed to protect the fragile wiring on the bottom of the assembly:

This shows the old lubricant encrusted parts ready for the ultrasonic cleaner:

Nice and shiny after an hour in the cleaner:

Then I began to reassemble everything. It is important to put a new gasket into the damper plunger:

This ensures that the arm lowering speed is consistent. The original gaskets have a tendency to occasionally cause the arm to drop un-dampened, which can be a harrowing moment (especially when a new $600 cartridge is mounted...;-).
Unfortunately, the spindle nut holder broke apart in the ultrasonic cleaner. They are frequently cracked due to overtightened screws. Luckily, the Beolover has a replacement part, which is shown here next to the broken original:

Here it is shown installed. It uses the original screw:

This shows the re-assembled arm lowering mechanism:

I also installed a new precision-machined aluminum carriage pulley to replace the original cracked plastic unit:

Now it was time to look into the damper-to-arm linkage, which is often also stuck due to hardened lubricants. It is located between the tone- and sensor arm assemblies, and mounted on the sensor arm side. You can see it here sticking out in the V-groove that is on the link mounted on the back of the counterweight assembly:

To get to the pivot point for cleaning and re-lubrication, the sensor arm needs to be removed. This shows the assembly out and the linkage removed:

Make sure you do not loose the small spring that is under the locking washer if you try this at home.
While I worked on this I also checked the small copper plate that eases the lateral arm movement when the arm is up. It is only attached with double sided tape and came off easily:

I cleaned the tape off and glued it back into place with epoxy:

The final step on the carriage was the replacement of the original incandescent bulb in the tracking sensor with a Beolover LED assembly. This shows the original black bulb housing still in place:

I removed the bulb housing, which revealed the aperture that regulates the light on the photo sensor depending on the arm alignment:

This shows the original bulb together with the Beolover LED assembly:

This shows it installed:

Next I removed the RPM panel above the keypad. This shows it extracted and flipped over, revealing the bulb housings:

I removed the covers. The bulbs are located in the small aluminum parts that hold them in place::

This shows the removed bulbs together with the Beolover LED assemblies that solder directly to the bulb solder points:

I soldered them into place:

They are basically extensions of the PCB:

The bulb covers can be re-installed, the LED boards do not obstruct them:

Next in line were the PCBs. I started with the main board. This board has two power transistors mounted on the solder-side. It is best to replace them with the board still in place since their heatsinks need to be aligned with the mounting holes of the board. This shows IC1, which is usually a TIP120:

I usually replace it with a TIP102 with is a stronger version. The modern replacements need a 100nF capacitor between the emitter and ground to quench some strange high-frequency oscillations that can cause the record detection circuitry to malfunction. The cap is the small yellow component above the transistor:

I also replaced IC4 with a TIP107 and moved on to the component side of the board. Unfortunately, I forgot to take a picture of the original state of the board. I only took one of the 'RPM section', which consists of the RPM relay and the master RPM trimmers to the left:

As usual I replaced all electrolytic capacitors, power transistors, the relay and the RPM trimmers, and the high-gain transistor in the record detection circuit (they often have reduced gain, which can imperil the record detection function). This shows the board with the new components installed:

Here a detail shot of the rebuilt RPM section with a Beolover replacement relay and modern 25-turn trimmers for precise RPM adjustment:

Then I moved on to the output board. This shows the original relay and capacitor still in place:

I replaced the relay with a Beolover replacement and put in a new capacitor. I also installed a (red) switch that allows connecting system and signal grounds in case there is a hum issue:

At this point it was time to clear out the enclosure since this unit had completely deteriorated transport lock bushings. First I removed the original deal-capacitance main capacitor:

Then it was time to take the entire floating chassis assembly out. This is done by removing the transport locks:

This shows the naked enclosure:

An impression of the remains of the original transport lock bushings:

Luckily, there is a Beolover replacement part for these. This shows the three replacement bushings:
They install very easily due to their two-component design. This shows one of the 'empty' bushings receptacles:
With one half of a new bushing installed
and completed with the other:
Here an impression how it looks with the locking bolt in place:
And on the way to the reassembly of the lock:
This shows the completed lock:

This Beogram also had lost its original plinth guiding washers. Someone replaced them with regular shoulder washers, which is an emergency solution at best:

The original washers are eccentric, which allows adjusting the lateral position of the plinth a bit. This shows the Beolover replacements:

They are made from resilient Nylon for smooth movement of the plinth:

There was still one light bulb left that needed to be replaced, the one in the sensor arm. This shows the small compartment at the end of the arm pulled out. You can see the bulb in place. Next to it is the Beolover LED assembly that replaces the bulb together with its alignment aid:

I removed the bulb and installed the LED board:

Then I put in a new reservoir capacitor. Since double-capacitance units like the original unit are not made anymore, I used a replacement assembly composed of a 3D printed adapter in which two standard capacitors are mounted:

Next I focused on repairing the off-switch on the carriage position detector board. It had lost its plastic extension. This prevented this Beogram from turning off properly when the carriage was in home position:

To repair this issue, it is best to remove the PCB:

This shows the other switch on this board which still sported the plastic part:

A while ago I designed small Beolover 3D printed replacements:

They are glued on with epoxy and restore the original functionality:

This deck still had another issue which needed to be addressed: One of the mounting pieces that hold the RPM panel in place had cracked. This happens when the RPM panel is pried out at an angle:

Luckily there are reproductions available at the Beoparts-shop in Denmark. All you need to do is remove the springs from the original cracked part

and transfer them to the new one:

After this was settled it was time to do the mechanical adjustments. First I adjusted the platter to be at the proper distance to the arms and parallel to their motion path. The next step was adjusting the floating chassis to yield a platter flush with the aluminum panels. This can take a few iterations since there is only little leeway for these adjustments due to the elegant flat design of the Beograms.
Once these basic adjustments are achieved, the arm lowering limit can be adjusted:

The needle should be about 1 mm above the lower segments of the platter ribs when the arm is lowered. An important safeguard to protect the needle should the arm ever be lowered due to a sensor malfunction.
Next came the adjustment of the tracking feedback:

Then I adjusted the bias of the sensor transistor to the specified 4V:

After moving the adjusted trimmer to the component side, I checked the sensor response with the oscilloscope. This is the signal obtained at the collector of the sensor transistor:

The amplitude should be close to 5V. This sensor performed very well.
At this point the bubbling of the oil infusing bearings had finally stopped, so I extracted them from the oil

and put them back into the motor. After installing the restored motor into the Beogram it was time to do a 24 hrs RPM stability test with the new BeoloverRPM device:

In its 'slow' mode, the BeoloverRPM allows logging the RPM in 10s installments for long periods of time, which is perfect for detecting intermittent RPM inconsistencies.
This is a graph of the 24 hrs measurement:

This result is pretty much as good as it gets with DC motor 4002s. The slow longterm drift is a result of temperature changes that affect the feedback circuitry.
In 'fast' mode the BeoloverRPM device shows the raw data and one can see the typical repeating 'platter pattern' that is a result of the small distance variations between the platter ribs, i.e. the pattern repeats every 24 data points:

This measurement artifact is the main reason for the noise observed in the longterm spectra.
A fast-mode measurement covering about 47 platter rotations also reveals the action of the feedback mechanism that keeps the RPM constant:

The beating pattern is a result of the superposition between the repeating 'platter pattern' and sinusoidal RPM changes caused by the feedback system. Beating phenomena occur when two waves of slightly different frequencies interfere with each other, creating a periodic variation known as a 'beat'. In this case it means that the feedback system varies the RPM a bit slower than the platter rotation. All feedback controlled brushed DC motors operate in this way, i.e. control electronics correct the speed based on an RPM measurement. When the motor is too slow, the voltage is increased a bit, causing it to accelerate, and when it is too fast the voltage is reduced causing a slowdown. This results in a periodic variation of the RPM. Optimization of the feedback circuit tries to minimize the ups and downs, but they can not be completely eliminated.
After this excursions into physics it was time to replace the somewhat messy original DIN5 plug:

I installed a nice new all-metal plug with gold plated contact pins:

Beolovely! And finally it was time for a test spin of this restored Beogram 4002! I selected one of my favorite records, "The Aura Will Prevail" by George Duke. He recorded this for the German MPS label in 1975. Of course this lovely vintage album was cleaned ultrasonically on a CleanerVinyl ProXL setup, which removed most crackling and restored its sound to its original glory.
A perfect combination! As expected this Beogram played the record perfectly!

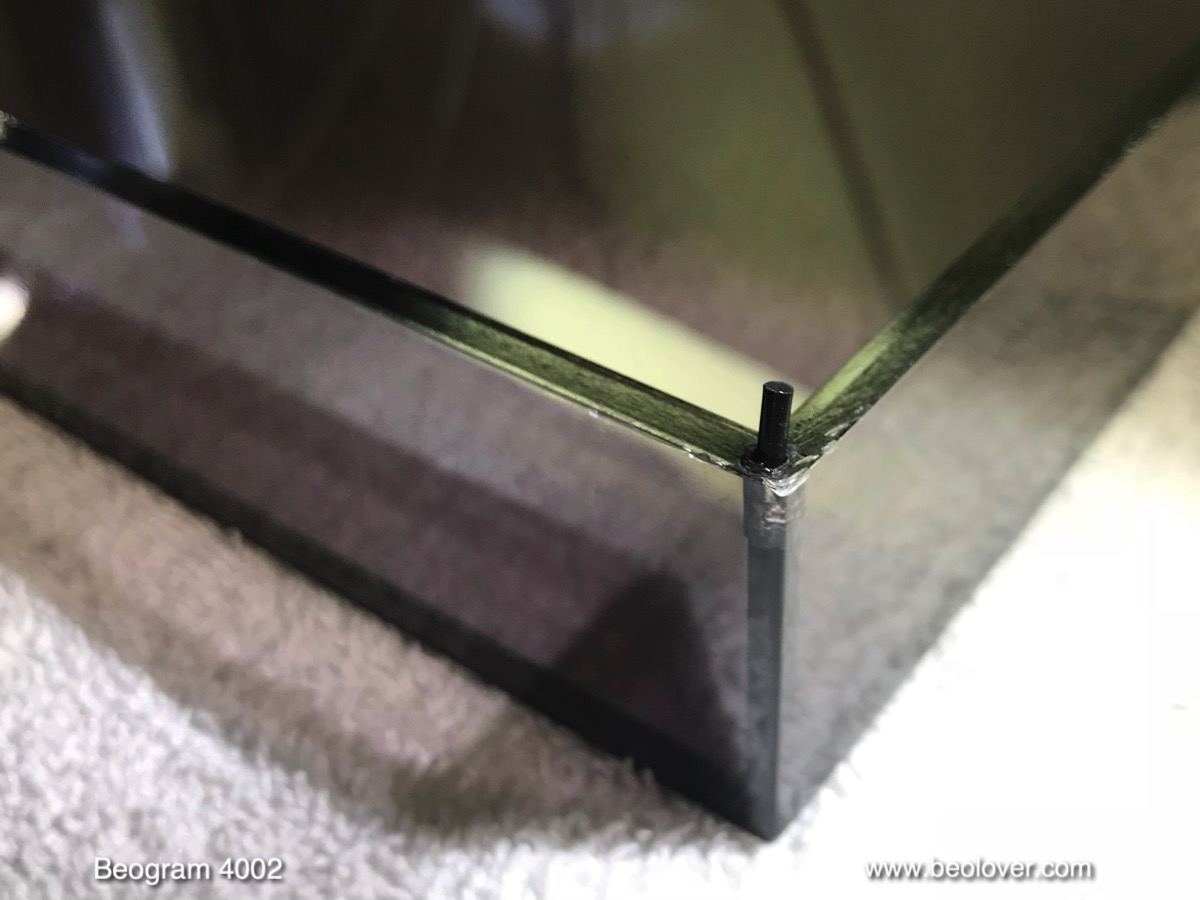
Next came the restoration of the hood, which needed an in-depth polishing:

I sanded it down with 400 grit paper until all the scratches were evened out:

Then I polished it back with ever finer girt until it was nice and shiny again:

The final step was installing new rubber bumpers ensuring a solid 'plop' when the hood is dropped onto the plinth. First I drilled out the remnants of the original bumpers:

Then I glued snippets of a 2 mm O-ring into the holes
and trimmed them to 1 mm length after the glue was dried:

And this concluded the restoration of this lovely Beogram 4002! I will now play it for 1-2 weeks to make sure it has no intermittent issues. Then it will be time to send it back to its owner in Texas!
No comments:
Post a Comment
Comments and suggestions are welcome!